Python Pid Template Vex V5
Python Pid Template Vex V5 - In this tutorial, we'll show you how to code a simple turn pid (i.e. Some additional information i would like to advise teams who are programming with pid: I also wrote a version of this in blockly and in python. What are some possible solutions to this problem? Pid(double p, double i, double d, motor_group pid_motor); Here is our current program:
Hello, i have been trying to add pid into my auton, but i can’t figure out how to add it with python programming. I would recommend jar template. What are some possible solutions to this problem? Explore python blocks, enums, ai vision, controller settings, and motor groups to optimize your robot's. Example projects and templates are a great resource if you are just getting started with vexcode v5 and want to explore different robot behaviors.
Pid in vex iq VEX IQ General Discussion VEX Forum

Hello, i have been trying to add pid into my auton, but i can’t figure out how to add it with python programming. // all activities that occur before the. As far as i can see, most people use c++. Here is our current program: Pid(double p, double i, double d, motor_group pid_motor);
PID vex IQ code blocks help VEXcode IQ Technical Support VEX Forum

Some additional information i would like to advise teams who are programming with pid: // all activities that occur before the. Return controller.kp*controller.error + controller.ki*controller.integral + controller.kd*controller.derivative; Pid(double p, double i, double d, motor_group pid_motor); Here is our current program:
Using the Python Competition Template in VEXcode V5 VEX Library
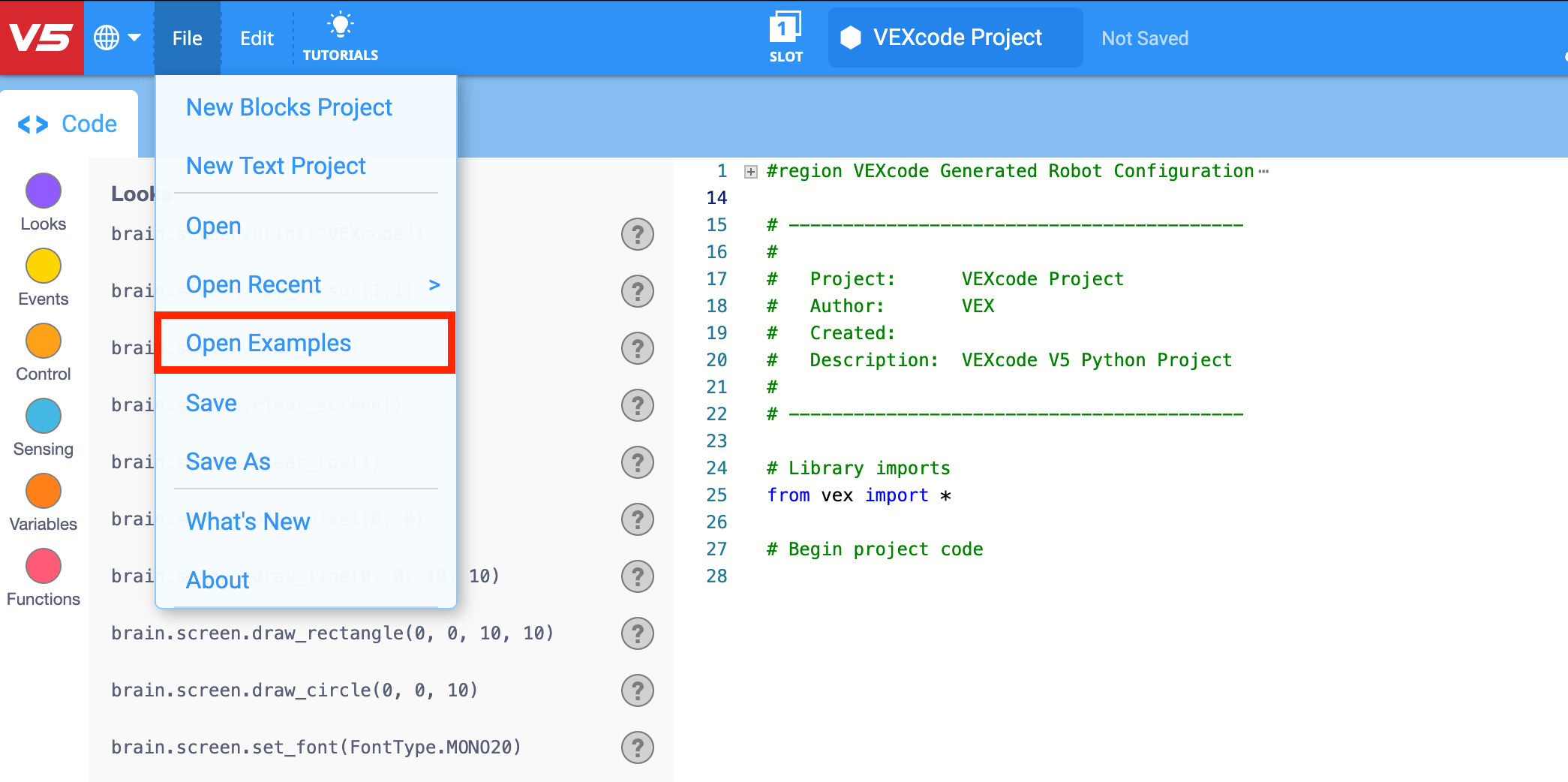
Sets a v5 smart motor's or motor group's encoder position (s) to the given value. I would recommend jar template. Accessing help in a vexcode v5 python project data logging with a vex brain and sensors using python starting, downloading, and running a python project in vexcode v5. Op wants python not c++. However, you don’t strictly need.
GitHub EraOfCoding/VEXPIDprogram This is automous PID controller
What are some possible solutions to this problem? Return controller.kp*controller.error + controller.ki*controller.integral + controller.kd*controller.derivative; Dive into the world of vex v5 programming with our extensive python documentation. Accessing help in a vexcode v5 python project data logging with a vex brain and sensors using python starting, downloading, and running a python project in vexcode v5. We'll use an inertial sensor.
PID vex IQ code blocks help VEXcode IQ Technical Support VEX Forum

Some additional information i would like to advise teams who are programming with pid: Op wants python not c++. // all activities that occur before the. Dive into the world of vex v5 programming with our extensive python documentation. Pid(double p, double i, double d, motor_group pid_motor);
Python Pid Template Vex V5 - As far as i can see, most people use c++. Dive into the world of vex v5 programming with our extensive python documentation. // all activities that occur before the. It’s built in to the v5. //combine all the parts of the pid function into the pid algorithm and return the value. I would recommend jar template.
Some additional information i would like to advise teams who are programming with pid: We'll use an inertial sensor to keep track of the robot's rotation. // all activities that occur before the. Here is our current program: Is it possible to get a pid template for vex v5 code python?
I Would Recommend Jar Template.
I also wrote a version of this in blockly and in python. We'll use an inertial sensor to keep track of the robot's rotation. Wpid was built with ease of use in mind, and allows teams to quickly implement the library and start. Is it possible to get a pid template for vex v5 code python?
Here Is Our Current Program:
Accessing help in a vexcode v5 python project data logging with a vex brain and sensors using python starting, downloading, and running a python project in vexcode v5. Op wants python not c++. Wpid is a high level pid library built for the v5 system, written using the vexcode api. Return controller.kp*controller.error + controller.ki*controller.integral + controller.kd*controller.derivative;
Follow The Instructions In Main.cpp To.
Pid(double p, double i, double d, motor_group pid_motor); In this tutorial, we'll show you how to code a simple turn pid (i.e. The robot turns in place). This command can be used to set a motor or motor group's position to a given positional value.
What Are Some Possible Solutions To This Problem?
Hello, i have been trying to add pid into my auton, but i can’t figure out how to add it with python programming. Initialize a pid instance with the kp, ki, and kd you want and it takes either a motor_group of motor object //combine all the parts of the pid function into the pid algorithm and return the value. // all activities that occur before the.